SAVIOUR (robot)
SAVIOUR is a rescue robot system from Pakistan. SAVIOUR is an acronym for "Semi Autonomous Vehicle for Inspection, Observation and Ultimate Rescue". The robot is the first rescue robot to be produced in Pakistan and was designed and built by the Ghulam Ishaq Khan Institute of Engineering Sciences and Technology (GIKI) in Topi, Pakistan.
Design
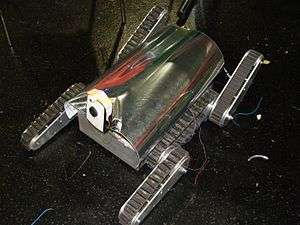
SAVIOUR stands for Semi‐Autonomous Vehicle for Identification, Observation and Ultimate Rescue and is a search and rescue robot designed to detect survivors in emergency situations and is capable of traversing and mapping a complex and unknown terrain.
SAVIOUR was designed and built by a team led by Wardah Inam. The rest of the team was Muneeb Zia, Muhammad Fahd Waseem, Saad Noor, Khwaja Umar Riaz, and Nasreen Shayeq. The robot was designed to complete its tasks using various sensors and is controlled via a wireless network for full remote mobility. It participated in RoboCup Rescue Robotics League in Austria in 2009. The tasks in the RoboCup, which it had to perform involved to do the localization and mapping of ‘victims’ in a simulated earthquake hit ‘arena’.
Capabilities
SAVIOUR is highly maneuverable and avoids obstacles by utilising ultrasonic sensors whilst maneuvering through complex terrains and situations. It searches for survivors using the intelligent processing of motion, heat, shapes, sound and CO2 emissions data. The robot is also capable of mapping its local terrain with the aid of an ultrasonic ranger and cameras which determine the position of the robot.
Participation at RoboCups
- The SAVIOUR robotics team will now participate in the RoboCup Iran Open 2011 to be held in Tehran and the RoboCup Internationals 2011 to be held in Turkey. This time the team is led by Farrukh Sohail and members are Azzam Ahmed,Fatima Javed Zaidi, Slaman Khan and Amaid Zia.
- The SAVIOUR Robotics team participated in the RoboCup Iran Open 2010 held in Tehran. The team consisted of Muhammad Fahd Waseem, Muhammad Muneeb Saleem, Muhammad Waqar Chughtai, Farrukh Sohail and Arsalan Khalid.[1]
- The SAVIOUR Robotics team participated in the RoboCup Internationals at Graz, Austria, in 2009. The team consisted of Wardah Inam, Muneeb Zia and Muhammad Fahd Waseem.[2]
References
- ↑ "GIKI participates in the RoboCup Iran Open, 2010, and qualifies for the RoboCup Finals, Singapore". Ghulam Ishaq Khan Institute of Engineering Sciences and Technology. Retrieved 11 July 2010.
- ↑ "RoboCup Rescue 2009 – RoboCup Rescue League Team" (PDF). Ghulam Ishaq Khan Institute of Engineering Sciences and Technology. Retrieved 11 July 2010.