Orbital Express
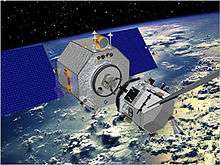
Orbital Express was a space mission managed by the United States Defense Advanced Research Projects Agency (DARPA) and a team led by engineers at NASA's Marshall Space Flight Center (MSFC). The Orbital Express program was aimed at developing "a safe and cost-effective approach to autonomously service satellites in orbit."[1] The system consisted of two spacecraft: the ASTRO servicing satellite, and a prototype modular next-generation serviceable satellite; NEXTSat. The mission launched from Cape Canaveral Air Force Station on March 8, 2007, aboard an Atlas V expendable launch vehicle.[2][3] The launch was part of the United States Air Force Space Test Program STP-1 mission.[4]
Program management and contractors
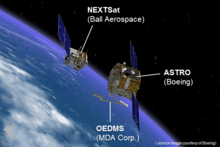
The Orbital Express program was managed by the Tactical Technology Office (TTO), one of the six technical offices in DARPA.[5] TTO programs included both "Aerospace Systems" such as Orbital Express, and "Tactical Multipliers" such as the "Magneto Hydrodynamic Explosive Munition (MAHEM) program".[6] ASTRO was developed by Boeing Integrated Defense Systems, which included the Orbital Express Demonstration Manipulator System (OEDMS) developed by MacDonald, Dettwiler and Associates,[7] and NEXTSat was developed by Ball Aerospace & Technologies Corp. NASA's involvement was through the Automated Systems and Automated Rendezvous and Docking Division of the Engineering Directorate at MSFC. The MSFC Engineering Directorate also managed the Advanced Video Guidance System (AVGS) for Orbital Express project.[8] The refueling mechanism was designed, developed and produced by VACCO Industries.
Goals
The project hoped to demonstrate several satellite servicing operations and technologies including rendezvous, proximity operations and station keeping, capture, docking, fluid transfer (specifically, hydrazine on this mission), and ORU (Orbit Replaceable Unit) transfer. A prime military mission would be to refuel reconnaissance satellites so they can improve coverage, increase surprise and be more survivable.[9]
The fluid (fuel) and ORU (battery) transfers were completed successfully at the lowest levels of spacecraft autonomy. Subsequent transfers over a three-month period were intended to demonstrate greater autonomy.[10]
Robotics: the Demonstration Manipulator System (OEDMS)
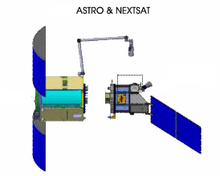
The Orbital Express Demonstration Manipulator System (OEDMS), provided by MDA Corp., was the mission’s integrated robotics solution. It consisted primarily of a 6-DOF rotary joint robotic arm, its flight avionics (the Manipulator Control Unit or MCU) and arm vision system, two On-Orbit Replaceable Units (ORUs) and their spacecraft attachment interfaces, a visual target and grapple fixture installed on NEXTSat, and the Manipulator Ground Segment.
The OEDMS was mounted on the ASTRO. It was used to capture and service the NEXTSat, the client satellite provided by Ball Aerospace. Using a robotic arm on-orbit, the Orbital Express mission demonstrated autonomous capture of a fully unconstrained free-flying client satellite, autonomous transfer of a functional battery ORU between two spacecraft, and autonomous transfer of a functional computer ORU. These operations were executed as part of mission scenarios that demonstrated complete sequences of autonomous rendezvous, capture, berthing and ORU transfer.
All robotic operations were scripted prior to execution and performed autonomously as part of increasingly complex mission scenarios. The arm was commanded to perform its operations by either direct command from the ground, or autonomously by the ASTRO Mission Manager software. Scenarios in the early phases of flight operations incorporated a number of Authority to Proceed (ATP) pause points, which required a signal to be sent from the ground to authorize the ASTRO Mission Manager to continue the sequence. This allowed the ground operations team to verify that the scenario was proceeding as planned before continuing to the next step. Later scenarios incorporated fewer ATPs. The final scenarios were compound autonomous sequences, performing rendezvous, capture, ORU transfer and fluid transfer without any ATPs.
End of mission
The final rendezvous and docking between the two spacecraft occurred on 29 June 2007. This was followed by the final demonstration, the changeout of a flight computer aboard ASTRO. NASA's plans for an extended mission were abandoned. The two craft demated for a final time, with ASTRO backing out to greater than 400 km (250 mi)[11] in a test of sensor performance. Following this the craft performed a rendezvous to a standoff, where decommissioning took place.[12] The NEXTSat spacecraft was deactivated on 21 July, when its computers were turned off, and solar panels pointed away from the Sun. Subsequently, ASTRO vented its Hydrazine propellant, and was deactivated on 22 July 2007. The satellites were left to decay naturally.[13]
NextSat was expected to take three to five years to decay, while the heavier ASTRO satellite was expected to take fifteen years.[13] However, ASTRO reentered the atmosphere on 25 October 2013.
See also
References
- ↑ "Boeing Integrated Defense Systems - Orbital Express". Boeing.
- ↑ "Look Ma! No (Human) Hands!". NASA. March 5, 2007.
- ↑ "Orbital Express Launches Successfully". NASA.
- ↑ "Orbital Express Space Operations Architecture". DARPA.
- ↑ "TTO Overview". DARPA.
- ↑ "TTO Programs". DARPA.
- ↑ "Autonomous Robotic Operations for On-Orbit Satellite Servicing". MDA Corporation.
- ↑ "Engineering Directorate Projects & Customers". NASA.
- ↑ Orbital Express To Test Full Autonomy for On-Orbit Service, Aviation Week, June 4, 2006
- ↑ "Orbital Express Conducts History's First Satellite-to-Satellite Hardware Transfer". SatNews. April 19, 2007.
- ↑ "Spaceflight Now - Breaking News - Satellite in-space servicing demo mission a success". spaceflightnow.com.
- ↑ Orbital Express Begins End-Of-Life Maneuver, Aviation Week, July 18, 2007
- 1 2 Clark, Stephen (2007-07-04). "In-space satellite servicing tests come to an end". Spaceflight Now. Retrieved 2014-03-20.
1. http://www.boeing.com/bds/phantom_works/orbital.html
External links
- DARPA Orbital Express web page 1 at the Wayback Machine (archived December 4, 2008) web page 2 at the Wayback Machine (archived December 24, 2010)
- Boeing's Orbital Express web page at the Wayback Machine (archived October 14, 2012)
- Ball Aerospace's Orbital Express web page at the Wayback Machine (archived June 10, 2007)
- MDA's Orbital Express web page at the Wayback Machine (archived February 6, 2012)
- Global Security's Orbital Express web page
- Orbital Express To Test Full Autonomy for On-Orbit Service, Aviation Week, 4 Jun 2006. Includes overview of several predecessor missions of unmanned orbital servicing technologies.