Open Roberta
| Paradigm | event-driven, imperative |
|---|---|
| Designed by | Beate Jost, Reihard Budde, Thorsten Leimbach, Achim Kapusta |
| Developer | Fraunhofer IAIS, Media Engineering Department |
| First appeared | 2013 (test) 2014 (official) |
| Stable release |
2.0
/ October 11, 2016 |
| Typing discipline | dynamic |
| Implementation language | Java, JavaScript, html (NEPO) |
| OS | Windows, Linux, iOS |
| License | Apache License 2 |
| Website |
www |
| Influenced by | |
| Scratch, Blockly | |
Open Roberta is the name of a project within the German education initiative "Roberta—Learning with robots", initiated by Fraunhofer IAIS, which is an institute belonging to the Fraunhofer Society. With Open Roberta Fraunhofer IAIS is looking to encourage kids to code by using Lego Mindstorms, a programmable robotics platform. The Cloud-approach of the Open Roberta Lab makes programming easier and minimizes the hurdles for teachers and schools to teach how to code.[1] Open Roberta is free and does not require any installation.[2] The project was initially founded with $1Mio[3][4] by Google.org[5]
Open Roberta Lab
Open Roberta Lab is cloud-based programming environment and is the user-facing middleware in a chain of software and firmware bits that make a robot work in a classroom environment.[6] This environment allows children and young people with no technical pre-knowledge to program a LEGO MINDSTORMS [7] EV3 and NXT robot, as well as the Arduino based robot Bot'n Roll ONE A,[8] the BBC micro:bit,[9] and the Calliope mini.[10] There is a variety of different program blocks available to program the motors, sensors, and the EV3 brick.[11] Open Roberta Lab uses the approach of visual programming. This approach makes it easier - especially for beginners with no experience - to learn how to code. As a cloud based programming environment no installation is needed, any operation system and computer hardware device may be used.[12][13] The big advantage of Open Roberta Lab is, that it can be used with any device (PC, tablet, smartphone) and with any operating system (Mac OS, Windows, Linux). Only a web browser is needed. The Lab can be used without registration. No user account is needed.
Open Source Community
The programming platform Open Roberta Lab is open source developed.[14] Both the software as well as the open source development tools are available on a server of Fraunhofer Society. The development team at Fraunhofer works together with teachers and education experts from the Roberta network. Therefore, also universities and students are involved in the development. It should address especially female students - the guiding principle of the Roberta project.[15]
Programming language NEPO®
NEPO is a free open source meta programming language that can be used by students, scholars, teachers, and other interested persons within the Open Roberta Lab. NEPO translates to New Easy Programming Online (or simply OPEN read backwards). NEPO is how we call our graphical programming language and its coupled hardware connection layer. NEPO uses the freely available Blockly library.[16] In addition within NEPO there are additional functionalities and improvements have been adapted for Open Roberta. The programming paradigm of NEPO is inspired by Scratch from Massachusetts Institute of Technology. A NEPO block always represents and encapsulates a certain robot functionality. A blocks feature set can easily be recognized through the associated block category, for example »sensors«. Programming with NEPO follows a simple principle. The blocks are interconnected and will be executed by the robot according to their order. This principle is called »sequential operation«.[17]
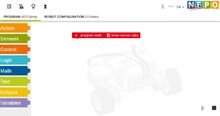
NEPO block categories
All available blocks are listed and categorized as the Action, Sensors, Control, Logic, Math, Text, Colours, Variables, Functions, and Massages as shown in the table below.
| Category | Notes | Category | Notes | |||
|---|---|---|---|---|---|---|
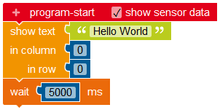
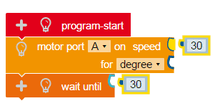
| Action | Includes blocks for the robot to be performed directly. | Text | Includes blocks to write strings on the robot display. | |||
| Sensors | Contains blocks for all standard sensors of the EV3 system. | Colours | Standard colour blocks to compare sensor inputs. | |||
| Control | Includes blocks for the program sequence control. The category includes the following blocks: If .. do, If .. do .. else, repeat indefinitely, repeat .. times, wait .. ms, wait until .. | Variables | Local and global variables can be defined. | |||
| Logic | With the »logic« blocks, conditions can be created. With this condition you can interrelate states, values, and events with each other. | Functions | Functions with input and output parameters can be defined. | |||
| Math | Mathematical operators and parameter blocks. | Messages | Includes blocks to send and receive bluetooth massages. | |||
| List | Includes blocks to create a list and to search or sort list elements. | program-start | Each program starts with this block. This block is always available in the workspace. | |||
NEPO input / output connector
Depending on the block different values can be passed to a block. The type of the value can be identified by the colored compounds (called including »connectors«) of a block. In the chapter »block category« you can see the different values a block may have. Only if the colors of the input and the output connector match, these blocks can be connected.
A block may optionally also pass a value (only one!) to another block. These blocks have colored output connectors. Only if the colors of the input and the output connector are the same, these blocks can be connected.

In total there are six input and output types within NEPO. These types can have the following values:
- Logical value (light blue)
- Number (dark Blue)
- String / Text (green)
- Colour (yellow)
- List (purple)
- Connection (pink)
Simulation environment

Since version beta 1.3.0 the Open Roberta Lab also offers a simulation environment. This is a simulation of a two-dimensional robot model equipped with two wheels (differential drive). To program the simulated robot also the programming language NEPO may be used. The simulated 2D model includes the simulation of an ultrasonic sensor, a touch sensor, a color sensor and the display of an LED. In addition, different environments can be chosen. Since version beta 1.4.0 NEPO blocks can used without any changes for the 2D-Simulation and the real robot.
History
Open Roberta is a technological extension of the "Roberta concept". Roberta (short for: "Roberta - Learning with robots") is a Fraunhofer education initiative founded in 2002 by the Germany Ministry of Education and Research.[18] Since 2002 more than 350.000 students participated in Roberta courses.
Awards
Open Roberta won the award "Bundessieger 2015" at the challenge "Germany Land of Ideas" in the category education.[19] Open Roberta won the bitkom award d-elina in the category professional.[20]
References
- ↑ Journal Learning und Medien (LOM)
- ↑ Open Roberta Website
- ↑ Pressemitteilung von Fraunhofer IAIS.
- ↑ Google Produkt Blog
- ↑ Google.org
- ↑ Hackaday.com
- ↑ LEGO Engineering Website
- ↑
- ↑ "The Micro:bit Foundation is a global non-profit organisation making invention with technology fun for everyone!". microbit.org. Retrieved 2016-11-16.
- ↑ "CALLIOPE | Home". calliope.cc. Retrieved 2016-11-16.
- ↑ Geek in Sydney
- ↑ „Open Roberta Lab“
- ↑ Jost, B., Ketterl, M., Budde, R., Leimbach, T. Graphical Programming Environments for Educational Robots: Open Roberta – Yet another One?, in IEEE International Symposium on Multimedia (ISM), December 2014
- ↑ The Next Web
- ↑ Open Roberta Developer Website
- ↑ Blockly Website
- ↑ „Dokumentation NEPO“
- ↑ Roberta Homepage
- ↑ Germany Land of Ideas
- ↑ bikom award
External links
- Project-Website Open Roberta
- Website Open Roberta Lab
- Website Open Roberta Developer
- Github project
- Website Open Roberta Wiki
- Open Roberta video summary