Cylindrical coordinate system
A cylindrical coordinate system is a three-dimensional coordinate system that specifies point positions by the distance from a chosen reference axis, the direction from the axis relative to a chosen reference direction, and the distance from a chosen reference plane perpendicular to the axis. The latter distance is given as a positive or negative number depending on which side of the reference plane faces the point.
The origin of the system is the point where all three coordinates can be given as zero. This is the intersection between the reference plane and the axis.
The axis is variously called the cylindrical or longitudinal axis, to differentiate it from the polar axis, which is the ray that lies in the reference plane, starting at the origin and pointing in the reference direction.
The distance from the axis may be called the radial distance or radius, while the angular coordinate is sometimes referred to as the angular position or as the azimuth.The radius and the azimuth are together called the polar coordinates, as they correspond to a two-dimensional polar coordinate system in the plane through the point, parallel to the reference plane. The third coordinate may be called the height or altitude (if the reference plane is considered horizontal), longitudinal position,[1] or axial position.[2]
Cylindrical coordinates are useful in connection with objects and phenomena that have some rotational symmetry about the longitudinal axis, such as water flow in a straight pipe with round cross-section, heat distribution in a metal cylinder, electromagnetic fields produced by an electric current in a long, straight wire, accretion disks in astronomy, and so on.
They are sometimes called "cylindrical polar coordinates"[3] and "polar cylindrical coordinates",[4] and are sometimes used to specify the position of stars in a galaxy ("galactocentric cylindrical polar coordinates").[5]
Definition
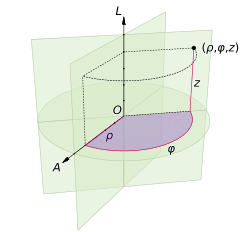
The three coordinates (ρ, φ, z) of a point P are defined as:
- The radial distance ρ is the Euclidean distance from the z-axis to the point P.
- The azimuth φ is the angle between the reference direction on the chosen plane and the line from the origin to the projection of P on the plane.
- The height z is the signed distance from the chosen plane to the point P.
Unique cylindrical coordinates
As in polar coordinates, the same point with cylindrical coordinates (ρ, φ, z) has infinitely many equivalent coordinates, namely (ρ, φ ± n×360°, z) and (−ρ, φ ± (2n + 1)×180°, z), where n is any integer. Moreover, if the radius ρ is zero, the azimuth is arbitrary.
In situations where one needs a unique set of coordinates for each point, one may restrict the radius to be non-negative (ρ ≥ 0) and the azimuth φ to lie in a specific interval spanning 360°, such as (−180°,+180°] or [0,360°).
Conventions
The notation for cylindrical coordinates is not uniform. The ISO standard 31-11 recommends (ρ, φ, z), where ρ is the radial coordinate, φ the azimuth, and z the height. However, the radius is also often denoted r or s, the azimuth by θ or t, and the third coordinate by h or (if the cylindrical axis is considered horizontal) x, or any context-specific letter.
In concrete situations, and in many mathematical illustrations, a positive angular coordinate is measured counterclockwise as seen from any point with positive height.
Coordinate system conversions
The cylindrical coordinate system is one of many three-dimensional coordinate systems. The following formulae may be used to convert between them.
Cartesian coordinates
For the conversion between cylindrical and Cartesian coordinates, it is convenient to assume that the reference plane of the former is the Cartesian xy-plane (with equation z = 0), and the cylindrical axis is the Cartesian z-axis. Then the z-coordinate is the same in both systems, and the correspondence between cylindrical (ρ,φ) and Cartesian (x,y) are the same as for polar coordinates, namely

in one direction, and

in the other. The arcsin function is the inverse of the sine function, and is assumed to return an angle in the range [−π/2,+π/2] = [−90°,+90°]. These formulas yield an azimuth φ in the range [−90°,+270°]. For other formulas, see the polar coordinate article.
Many modern programming languages provide a function that will compute the correct azimuth φ, in the range (−π, π], given x and y, without the need to perform a case analysis as above. For example, this function is called by atan2(y,x) in the C programming language, and atan(y,x) in Common Lisp.
Spherical coordinates
Spherical coordinates (radius r, elevation or inclination θ, azimuth φ), may be converted into cylindrical coordinates by:
| θ is elevation: | θ is inclination: |


Cylindrical coordinates may be converted into spherical coordinates by:
| θ is elevation: | θ is inclination: |


Line and volume elements
- See multiple integral for details of volume integration in cylindrical coordinates, and Del in cylindrical and spherical coordinates for vector calculus formulae.
In many problems involving cylindrical polar coordinates, it is useful to know the line and volume elements; these are used in integration to solve problems involving paths and volumes.
The line element is

The volume element is

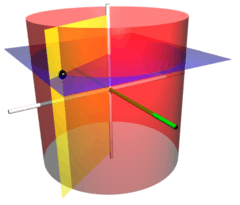
The surface element in a surface of constant radius ρ (a vertical cylinder) is

The surface element in a surface of constant azimuth φ (a vertical half-plane) is

The surface element in a surface of constant height z (a horizontal plane) is

The del operator in this system leads to the following expressions for gradient, divergence, curl and Laplacian:
![{\displaystyle {\begin{aligned}\nabla f&={\frac {\partial f}{\partial \rho }}{\boldsymbol {\hat {\rho }}}+{\frac {1}{\rho }}{\frac {\partial f}{\partial \varphi }}{\boldsymbol {\hat {\varphi }}}+{\frac {\partial f}{\partial z}}\mathbf {\hat {z}} \\[8px]\nabla \cdot {\boldsymbol {A}}&={\frac {1}{\rho }}{\frac {\partial }{\partial \rho }}(\rho A_{\rho })+{\frac {1}{\rho }}{\frac {\partial A_{\varphi }}{\partial \varphi }}+{\frac {\partial A_{z}}{\partial z}}\\[8px]\nabla \times {\boldsymbol {A}}&=\left({\frac {1}{\rho }}{\frac {\partial A_{z}}{\partial \varphi }}-{\frac {\partial A_{\varphi }}{\partial z}}\right){\boldsymbol {\hat {\rho }}}+\left({\frac {\partial A_{\rho }}{\partial z}}-{\frac {\partial A_{z}}{\partial \rho }}\right){\boldsymbol {\hat {\varphi }}}+{\frac {1}{\rho }}\left({\frac {\partial }{\partial \rho }}(\rho A_{\varphi })-{\frac {\partial A_{\rho }}{\partial \varphi }}\right)\mathbf {\hat {z}} \\[8px]\nabla ^{2}f&={\frac {1}{\rho }}{\frac {\partial }{\partial \rho }}\left(\rho {\frac {\partial f}{\partial \rho }}\right)+{\frac {1}{\rho ^{2}}}{\frac {\partial ^{2}f}{\partial \varphi ^{2}}}+{\frac {\partial ^{2}f}{\partial z^{2}}}\end{aligned}}}](../I/m/569d33592a452a729495a111fd4c85103803c9f0.svg)
Cylindrical harmonics
The solutions to the Laplace equation in a system with cylindrical symmetry are called cylindrical harmonics.
See also
- List of canonical coordinate transformations
- Vector fields in cylindrical and spherical coordinates
- Del in cylindrical and spherical coordinates
References
- ↑ Krafft, C.; Volokitin, A. S. (1 January 2002). "Resonant electron beam interaction with several lower hybrid waves". Physics of Plasmas. 9 (6): 2786–2797. Bibcode:2002PhPl....9.2786K. doi:10.1063/1.1465420. ISSN 1089-7674. Retrieved 9 February 2013.
...in cylindrical coordinates (r,θ,z) ... and Z = vbzt is the longitudinal position...
- ↑ Groisman, Alexander; Steinberg, Victor (1997). "Solitary Vortex Pairs in Viscoelastic Couette Flow". Physical Review Letters. 78 (8): 1460–1463. Bibcode:1997PhRvL..78.1460G. doi:10.1103/PhysRevLett.78.1460.
...where r, θ, and z are cylindrical coordinates ... as a function of axial position...
- ↑ Szymanski, J. E. (1989). Basic Mathematics for Electronic Engineers: models and applications. Tutorial Guides in Electronic Engineering (no. 16). Taylor & Francis. p. 170. ISBN 978-0-278-00068-1.
- ↑ Nunn, Robert H. (1989). Intermediate Fluid Mechanics. Taylor & Francis. p. 3. ISBN 978-0-89116-647-4.
- ↑ Sparke, Linda Siobhan; Gallagher, John Sill (2007). Galaxies in the Universe: An Introduction (2nd ed.). Cambridge University Press. p. 37. ISBN 978-0-521-85593-8.
Further reading
- Morse, Philip M.; Feshbach, Herman (1953). Methods of Theoretical Physics, Part I. New York City: McGraw-Hill. pp. 656–657. ISBN 0-07-043316-X. LCCN 52011515.
- Margenau, Henry; Murphy, George M. (1956). The Mathematics of Physics and Chemistry. New York City: D. van Nostrand. p. 178. ISBN 9780882754239. LCCN 55010911. OCLC 3017486.
- Korn, Granino A.; Korn, Theresa M. (1961). Mathematical Handbook for Scientists and Engineers. New York City: McGraw-Hill. pp. 174–175. LCCN 59014456. ASIN B0000CKZX7.
- Sauer, Robert; Szabó, István (1967). Mathematische Hilfsmittel des Ingenieurs. New York City: Springer-Verlag. p. 95. LCCN 67025285.
- Zwillinger, Daniel (1992). Handbook of Integration. Boston: Jones and Bartlett Publishers. p. 113. ISBN 0-86720-293-9. OCLC 25710023.
- Moon, P.; Spencer, D. E. (1988). "Circular-Cylinder Coordinates (r, ψ, z)". Field Theory Handbook, Including Coordinate Systems, Differential Equations, and Their Solutions (corrected 2nd ed.). New York City: Springer-Verlag. pp. 12–17, Table 1.02. ISBN 978-0-387-18430-2.
External links
- Hazewinkel, Michiel, ed. (2001), "Cylinder coordinates", Encyclopedia of Mathematics, Springer, ISBN 978-1-55608-010-4
- MathWorld description of cylindrical coordinates
- Cylindrical Coordinates Animations illustrating cylindrical coordinates by Frank Wattenberg